Este dimarts 27 d’agost l’agència espacial russa va conseguir un nou èxit en la seua personal trajectòria aeroespacial. Després d’un intent frustrat el passat dissabte, el primer robot humanoide rus va accedir a l’Estació Espacial Internacional. Fa uns anys, hi va arribar l’americà per a fer faenes impossibles per a la resta d’astronautes.
La nova operació d’acoblament ha eixit redona després que el cap de setmana un error informàtic en el sistema d’orientació de la nau Soyuz va impedir l’accés a l’EEI. Pareix que la nau es va acostar a l’escotilla d’accés de l’Estació i uns sensors van detectar vibracions que van originar l’avortament de la maniobra per motius de seguretat.
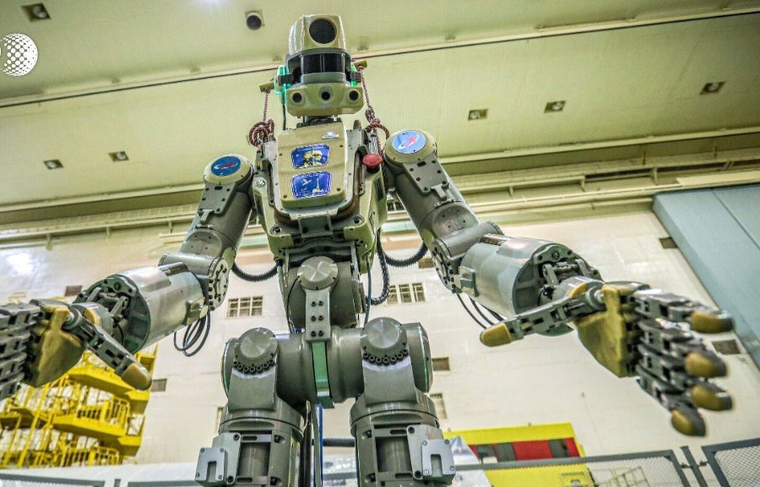
Però el dimarts es va repetir la maniobra i va eixir molt bé i Fiodor, el robot rus, ha pogut entrar en l’EEI. Es preveu que estarà fent diversos treballs de gran precisió fins al 6 de setembre i, el 7, tornarà a la Terra.
The #SoyuzMS14 spacecraft docked to the Zvezda module of the International Space Station. The crew is now preparing to open the hatches.
The Soyuz ship delivered about 670 kg of dry cargo to the ISS pic.twitter.com/GWzO1vyoLK
— Ð ÐСÐÐСÐÐС (@roscosmos) August 27, 2019
Androide ruso “Fiódor” entra en estación espacial tras acoplamiento de Soyuz: “Mis disculpas por el retraso. Me quedé atrapado en un atasco. Estoy listo para continuar con mi trabajo”, explicó el robot en su cuenta de Twitter. https://t.co/AwXwM83VUU pic.twitter.com/LVv65lQ2C3
— Luis Rosario:. (@LuisRosarioM) August 27, 2019
Que pot conseguir fer Fiodor a l’Estació Espacial?
El primer robot humanoide rus en l’espai, el model Skybot F-850, és una màquina multifuncional. Tal com expliquen fonts russes, al principi estava previst que fora utilitzat en treballs de rescat, per a l’evacuació de persones en zones perilloses afectades per incendis però, més avant es va anunciar que podria ser utilitzat per a propòsits militars, d’educació i, fins i tot, en missions espacials. I, per a eixes funcions, ha pujat fins a l’espai.
El cosmonauta rus Alexánder Skvortsov dirigirà el robot a través d’un exoesquelet metàl·lic que té 32 nivells de mobilitat. Com si es tractara del comandament d’un videojoc, controlarà el robot per a que es moga fora la nau, per a que fça faenes de manteniment en l’EEI i investigació espacial.